?
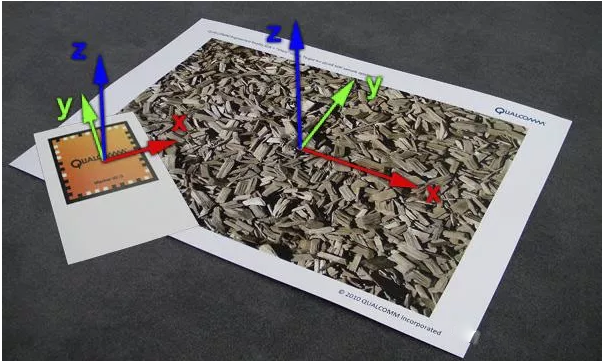
跟蹤理論會涉及到一些空間坐標轉換的基礎知識,以攝像機跟蹤為例,分為模型坐標空間、世界坐標空間、攝像機坐標空間和圖像坐標空間。
1.固定式跟蹤系統
機械跟蹤器通過控制機械臂各個關節的轉動來跟蹤機械臂末端的空間位置,屬于比較老的跟蹤方式,但是精度可以控制得比較高。
電磁跟蹤器是通過一個固定的發射源發射出三維正交的電磁場,接收端通過檢測接收到的電磁場的方向和強度來確定位姿。

?
超聲波跟蹤器則是通過測量一個聲音脈沖從發射源到傳感器的飛行時間來測量距離。
2.?移動式傳感器
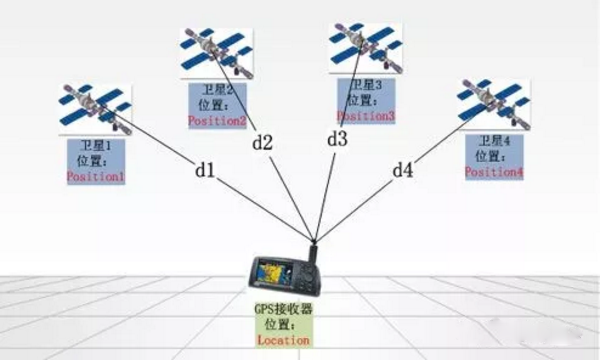
GPS,全稱是全球定位系統。這個系統在智能手機上應用很普遍。它通過接收多顆衛星信號來確定當前所處的位置。對于戶外大范圍增強現實有著重要意義。
無線網是通過檢測移動設備接入點信息來粗略確定移動設備所處位置的。它可以配合GPS使用。
?
磁力計,也稱電子羅盤,通過檢測地球的磁場來確定方向。?
陀螺儀和線性加速度計都是依靠慣性來進行測量的。陀螺儀測量三軸角度變化,線性加速度計測量位置變化。它們通常會配合使用,并且常以微機電系統(MEMS, Micro-Electro-Mechanical System)的形式存在。
里程計是通過輪式或者光電編碼器來測量所走過路程的一種傳感器,常用在機器人或者交通工具中。
3. 光學跟蹤技術
(1)跟蹤模式
有些跟蹤需要對被跟蹤的目標預先建模,例如一些圖像跟蹤工具箱。有的則不需要提前建模,例如同步定位與跟蹤技術(SLAM)。多數跟蹤是需要提前建立一個待跟蹤模型數據庫的,然后在運行中實時提取特征并且與數據庫中的數據進行比對。而SLAM則可以實時根據獲得的特征,自主建立空間地圖,并且確定攝像頭相對于環境的位置。
目前研究的比較火熱的是SLAM。因此,可以研究SLAM中的各個環節,從跟蹤、建圖、回環檢測等角度研究如何提升SLAM系統的精度,以及面對復雜環境的穩定性問題。
?
(2)照明種類
跟蹤的穩定性與環境光有關,尤其是基于視覺的跟蹤。有些跟蹤系統不需要自主添加光源,只是利用環境光,稱為被動照明;有些跟蹤需要主動發射某種照明光線,來實現其跟蹤,稱為主動照明。被動照明是比較常見的,例如平面標志跟蹤就是在普通的環境照明下實現的。主動照明最典型的就是結構光照明,例如Kinect。還有一種主動發射紅外光的OptiTrack系統,做姿態跟蹤效果很好。
(3)人工標志與自然特征
人工標志指的是人造的用于跟蹤的圖像標志等。例如二維碼、棋盤格等。自然特征指的是自然環境中本身就有的特征,不是人為放置用來跟蹤的特征。普通的室內環境、街邊的樓宇都可以認為是自然特征。人工標志根據其種類不同,需要特定針對性算法進行檢測和跟蹤,自然特征通常使用SIFT、SURF、ORB等特征描述子來進行特征提取和跟蹤。
?
4.傳感器融合
互補式融合:不同的傳感器測量的是不同種類的參數,可以互相補充。
競爭式融合:不同傳感器測量的是同一個種類的參數,則使用某種方式將它們結合起來,產生一個更好的測量結果。
協作式融合:不同傳感器之間是協作關系,其中某個傳感器可能依賴于其他的傳感器才能得出結果。
跟蹤技術研究,不僅可以服務于增強現實,也可以服務于虛擬現實,以及其他需要用到該技術的領域。研究跟蹤技術,可以從多視圖幾何方向入手,通過幾何的方式來估計位姿。也可以從特征角度入手,針對特定的問題,設計不同的特征表述方式,解決問題。
SLAM研究者們通常會考慮怎樣建立更加穩健的SLAM系統,怎樣對抗真實環境中的噪聲,怎樣進行更好的回環檢測等。研究慣性測量單元(IMU)與視覺融合進行SLAM的也大有人在,多傳感器數據融合對于SLAM來講有重要的意義。